

We are building a quantum computing simulator from scratch, beginning from the basics—qubits, circuits, and visualizations. This open-source project is a software development project involving the frontend and backend design. The goal is to learn quantum computing and leverage your coding skills simulatenously. If you want to join the project, please fill out this Project Interest Form!
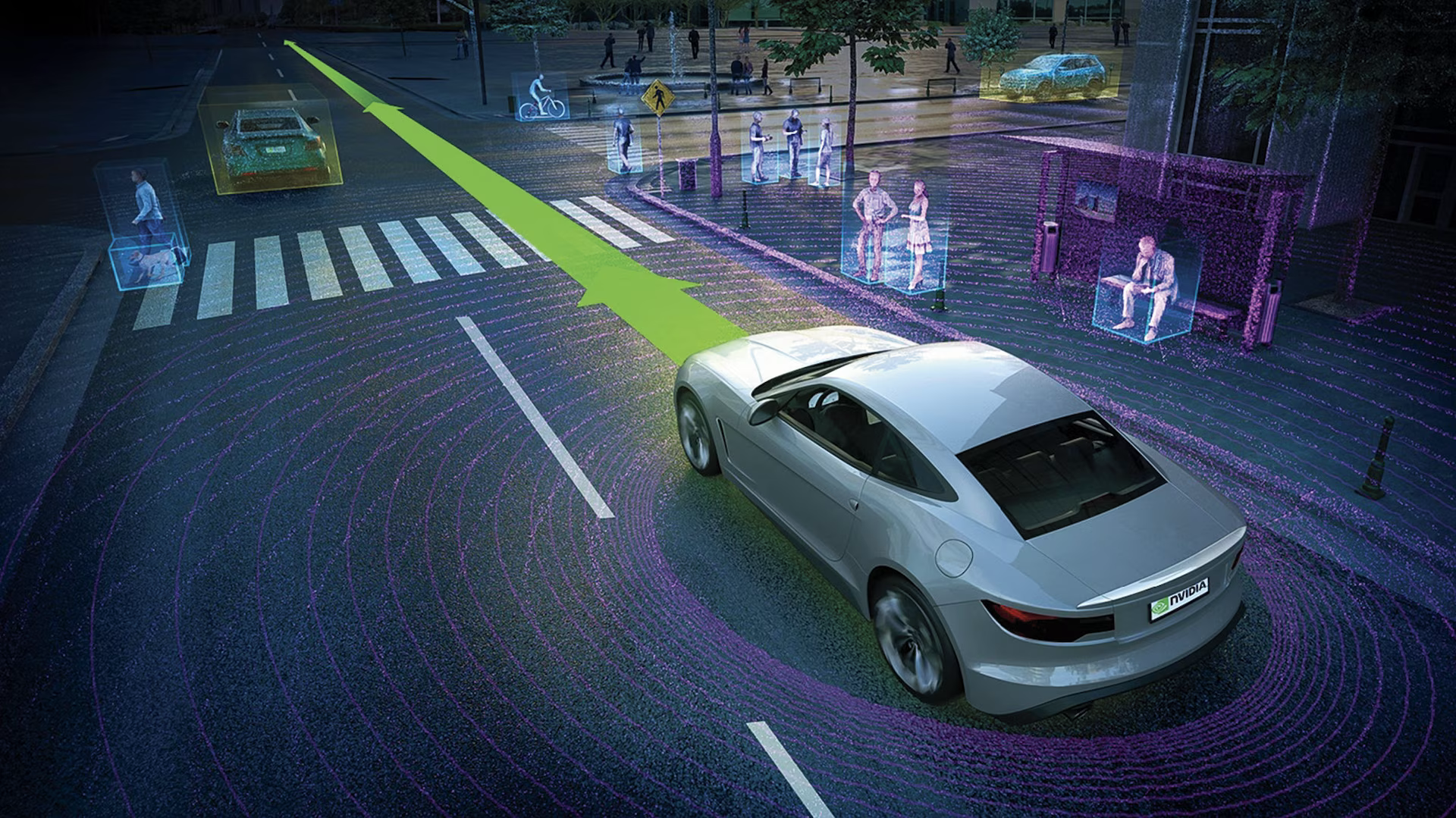
We created a hybrid quantum-classical Convolutional Neural Network to predict vehicle steering angles from road images. Our architecture blends quantum variational circuits with classical optimization algorithms, merging AI and quantum computing for real-world self-driving. Feel free to check out our presentation at the Symposium on Quantum Undergraduate Inquiry & Discovery (S.Q.U.I.D. 2023).
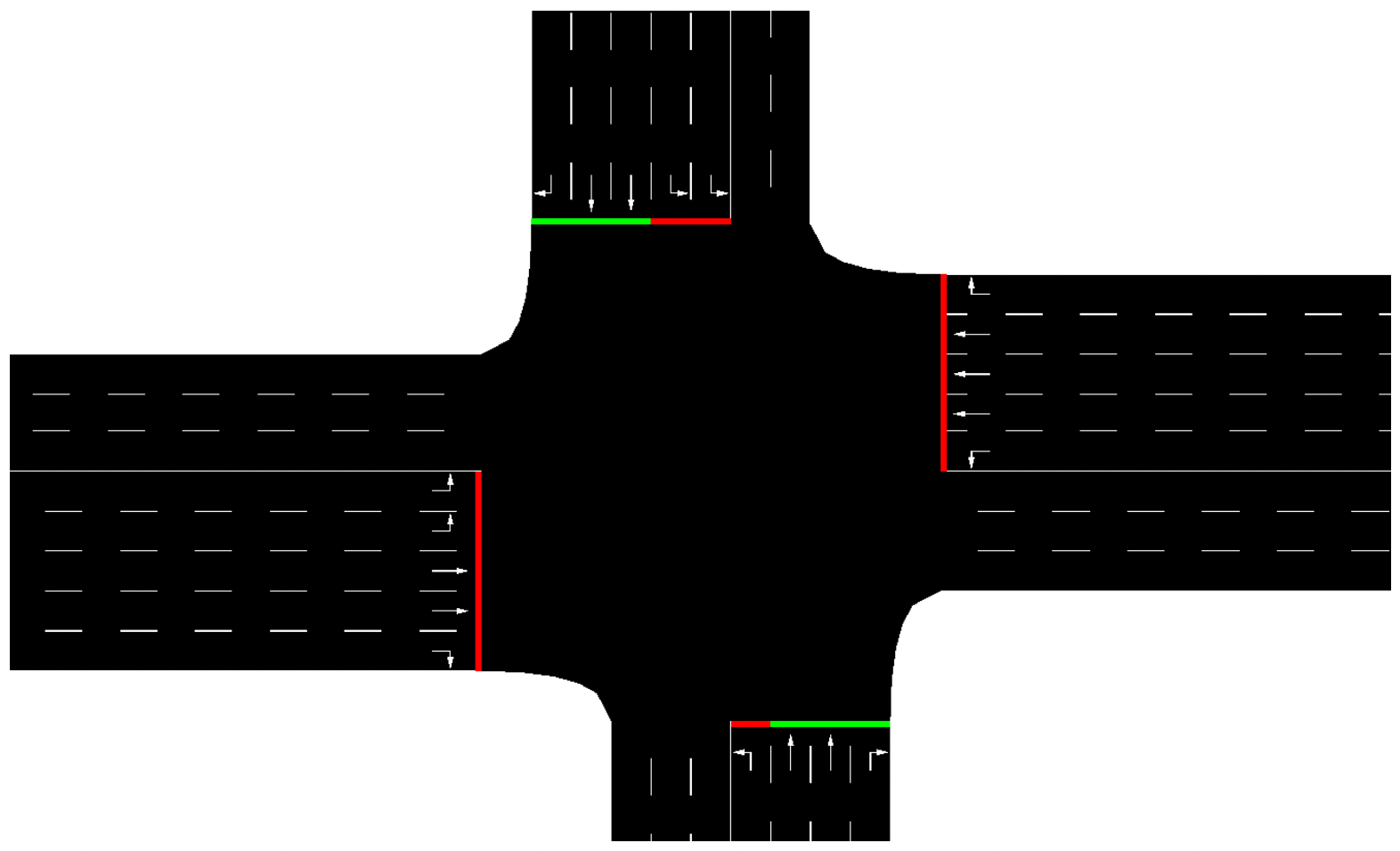
We're building quantum reinforcement learning agents to optimize traffic lights in real time, improving city flow and reducing congestion. We explore quantum annealing, QAOA, and hybrid methods to control intersections adaptively using real-world data.